当前位置:
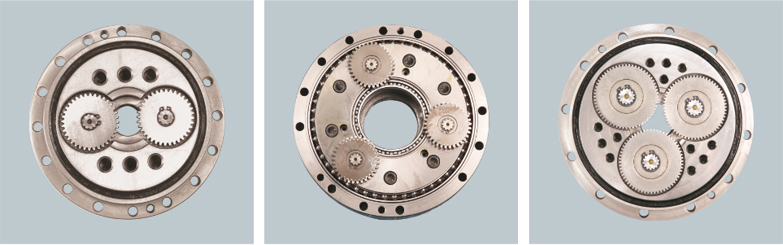
高精密RV减速器
RV减速器具有以下特点: 1.输出扭矩与传动比范围大 2.传动效率高,传动平稳,噪声小 3.散热效率高,工作寿命长
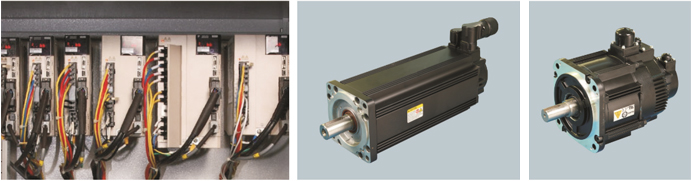
高性能伺服驱动与电机
根据负载惯量的变化,与自适应滤波器配合, 从低刚性到高刚性都可以自动的调整增益。 通过面板操作,电机可以在实时监控的同时, 进行参数的设定和确认。
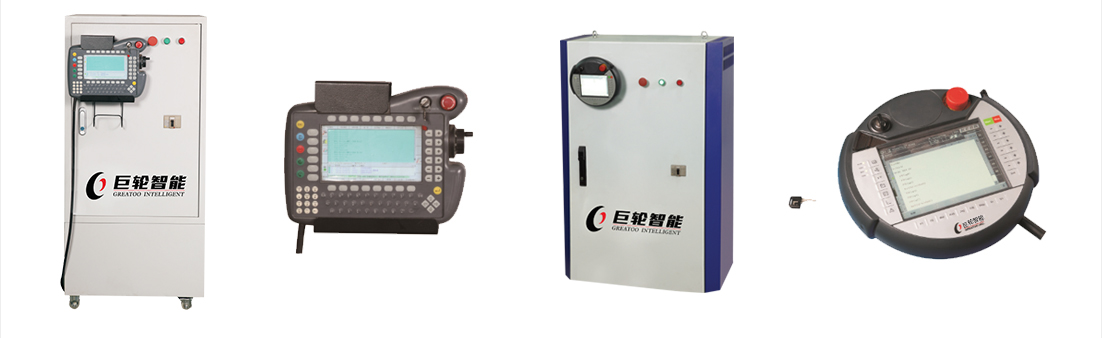
控制系统
示教盒上配备有USB接口,是程序的备份导入更方便。 能通过示教器完成示教与编程等系列操作,同时监控各种输出输入信号与位置信号。 通过以太网接口,可在电脑模拟示教盒界面,完成机器人示教,编程、PLC开发等一系列操作。
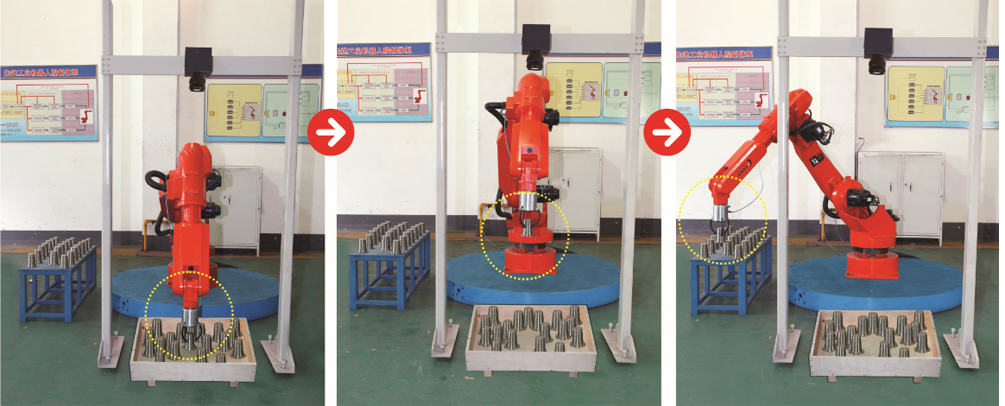
专用夹具
根据工件与工艺的不同需求,提供整套夹具的解决方案,确保工件能快速、准确定位。
单元控制系统
单元控制系统包括单元建模、单元运行控制、单元异构设备通讯、单元仿真、单元异常预警、单元加工装备监控等功能。
可实现以机器人为核心,连接单元内不同类型机床、检测设备、清洁站等装备,
通过即时通讯和指令传送,实现单元内的任务调度、自动上下工件、自动检测、工件偏移值补偿等工作。
机器人离线编程
在计算机中建立起机器人及其工作环境的模型,通过对图形的控制和操作,在不使用实际机器人的情况下进行编程,进而产生机器人程序。与传统在线示教编程相比,离线编程具有减少机器人不工作时间、使编程者远离危险的工作环境、便于修改机器人程序、可结合各种人工智能等技术提高编程效率等优点。
机器人视觉系统
机器人视觉系统由三部分组成:图像的获取、图像的处理和分析、图像的输出。视觉系统主要应用于指导机器人正确位置的抓取和放置;实现了不同形状与
不同放置的精确定位抓取。